Get Started
Kickstart robotics development in a few steps with LGDXRobotics.
Prerequisites
Ensure Docker and Docker Compose are installed, as everything is deployed using Docker images. Then, download and unzip the configuration settings (GitHub).
Install LGDXRobot Cloud
LGDXRobot Cloud is a cloud-based robot management system for managing robots and automated tasks.
- Launch a terminal and navigate to the configuration settings directory you just downloaded,
then run the following commands:
cd docker-compose
docker-compose up - LGDXRobot Cloud will be available at http://localhost:5102,
and the default username and password are
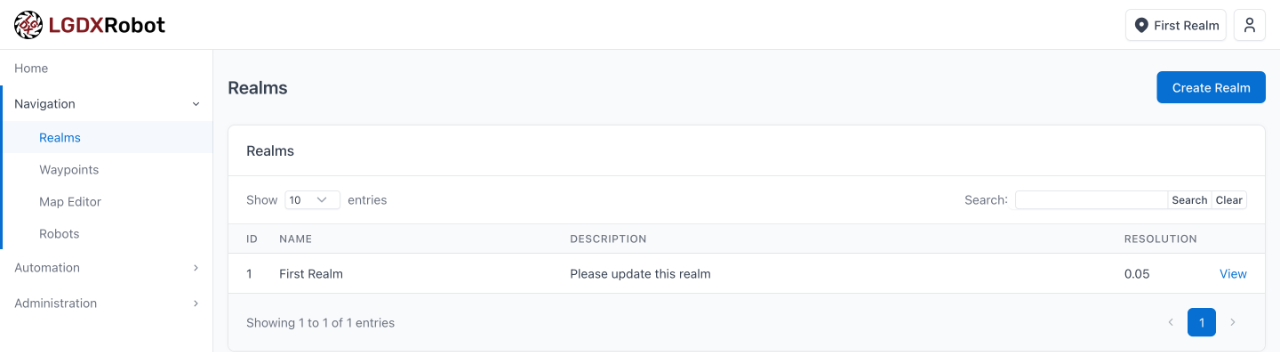
adminand123456. - Next, expand Navigation in the left sidebar and click Realms.
Select View for the first realm.
- Upload
example.pngfor the map image and press Update to save the changes.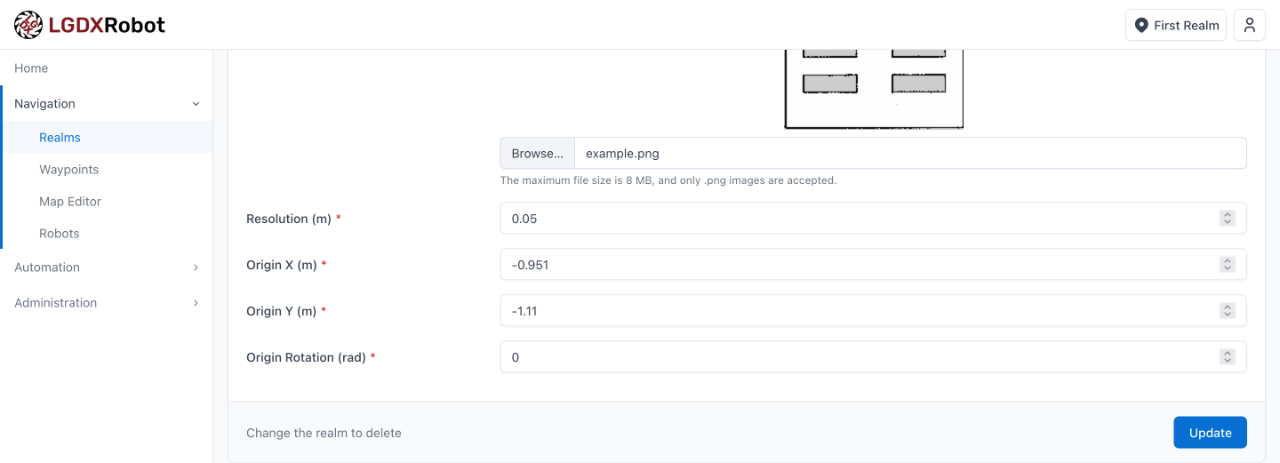
Setup LGDXRobot 2
LGDXRobot 2 is a low-cost, highly configurable DIY Mecanum wheel chassis that supports ROS2 and simulation.
- Open a new terminal, navigate to the configuration settings directory you just downloaded, and run the following command:
docker run --rm -it \ --name lgdxrobot2 \ -e PUID=1000 \ -e PGID=1000 \ -v ./keys:/config/keys \ -p 3000:3000 \ -p 3001:3001 yukaitung/lgdxrobot2.desktop:latest
- The web interface will be available at http://localhost:3000. It includes a terminal to run any application. If the terminal is closed, you can right-click on the desktop and relaunch it from the menu.
- To start an example, run the following command:
ros2 launch lgdxrobot2_bringup simulation_two_robots.launch.py
Hint: Click the blue button on the middle-left to expand the settings. Paste the command into the Clipboard section—this allows you to paste it directly into the terminal.
Start An Automated Task
- From the LGDXRobot Cloud home page, click Create Task.
- Enter Flow 1 as the flow name and Waypoint 2 as the first waypoint, then press Add Waypoint.
- Next, enter Waypoint 8 as the second waypoint and press Create.
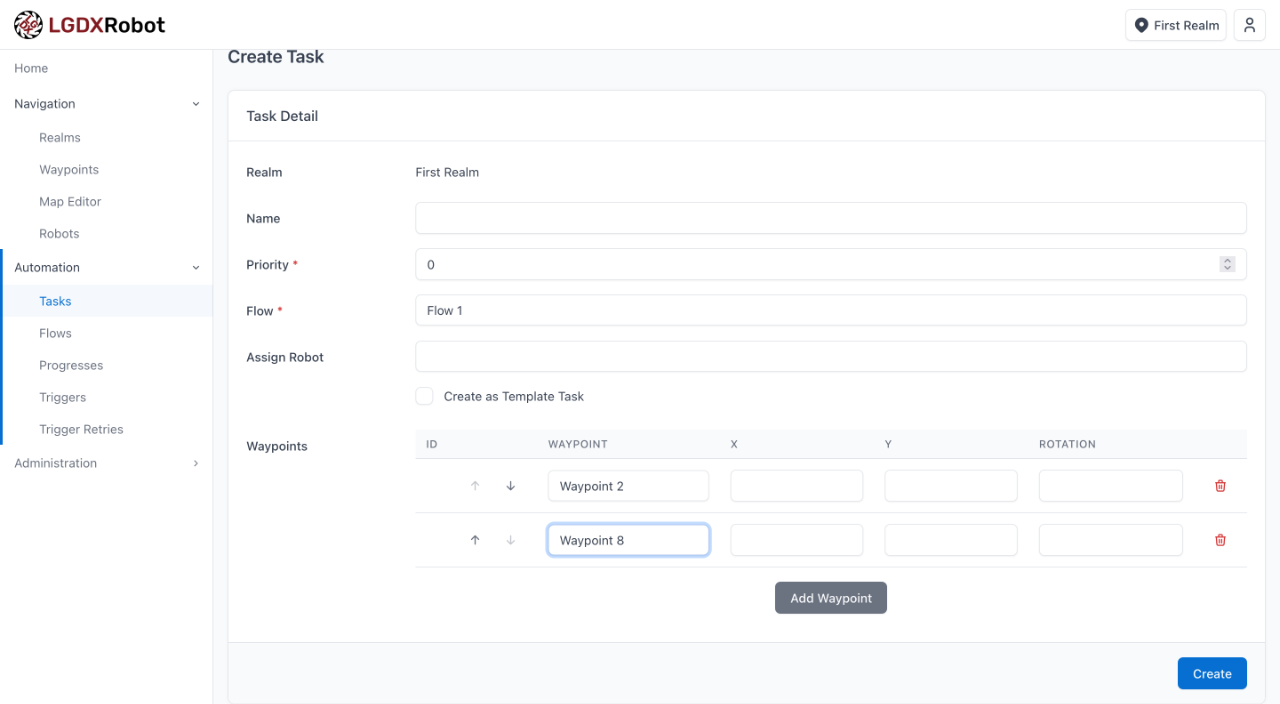
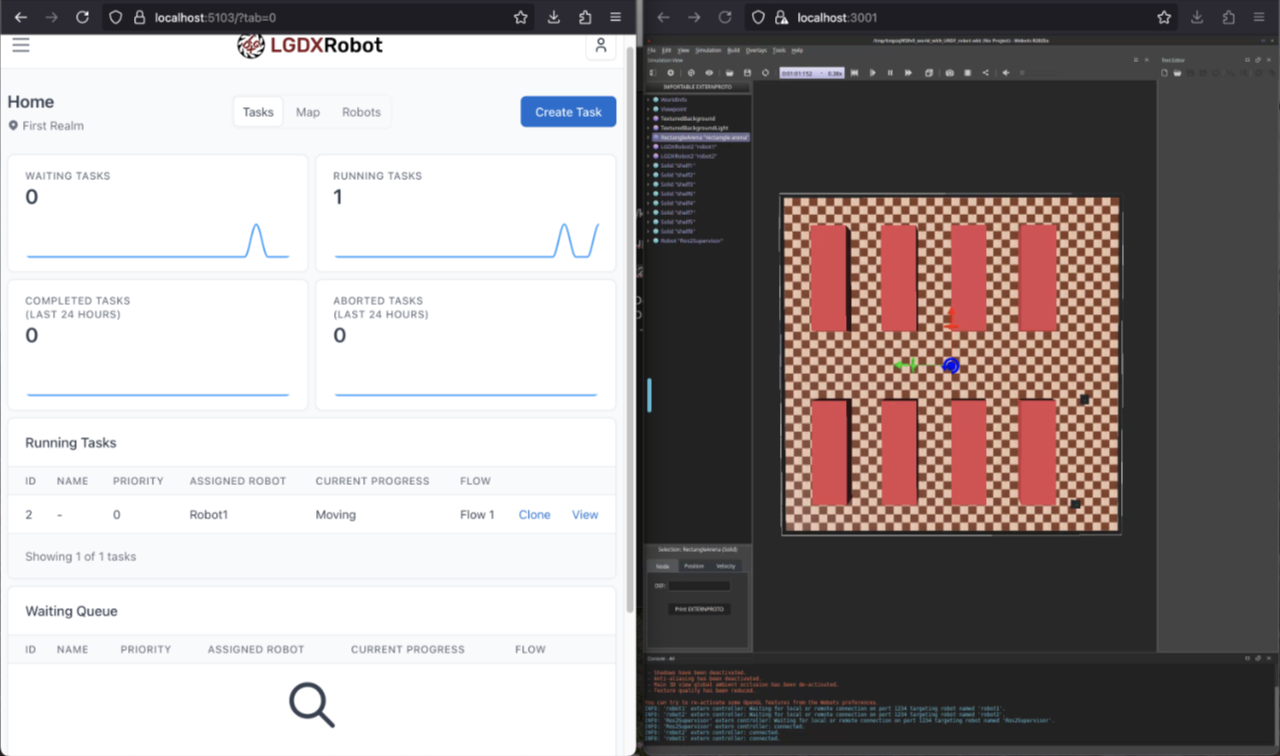
- One of the robots will begin moving.
Next Steps
- Learn more about LGDXRobot Cloud, source code is available on GitLab or GitHub.
- Learn more about LGDXRobot2, source code is available on GitLab or GitHub.
- Explore the documentation for more details.