開始探索
簡單步驟展開機械人開發之路,輕鬆起動。
前期準備
這個系統使用 Docker 快速部署,首先安裝 Docker 和 Docker Compose , 然後下載並解壓設定檔(GitHub)。
安裝 LGDXRobot 雲端管理系統
LGDXRobot 雲端管理系統是一個管理機械人及自動化任務的平台。
- 打開終端機,進入剛下載的設定資料夾,然後執行以下指令:
cd docker-compose
docker-compose up - 進入 http://localhost:5102 開啟雲端管理系統,預設使用者名稱和密碼為
admin和123456。 - 在左方的側邊欄展開 Navigation,按下 Realms,然後選擇第一個 realm 的 View。
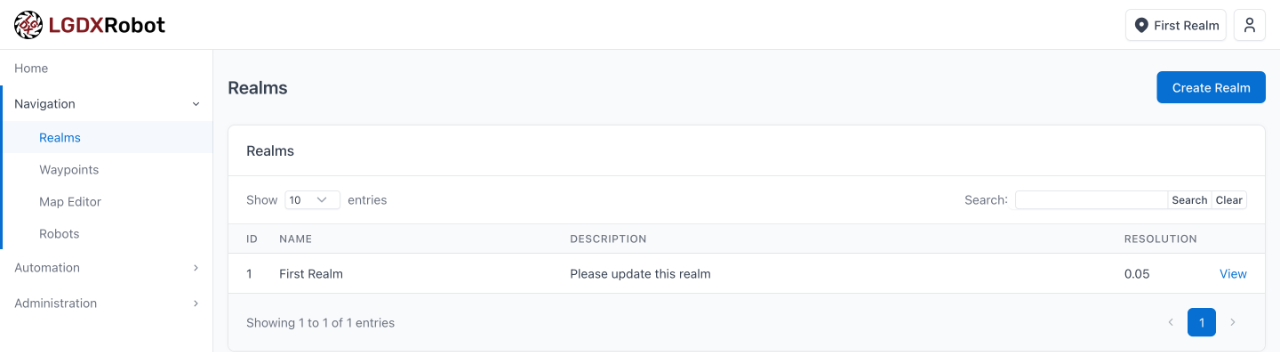
- 上傳
example.png作為地圖,然後按下 Update 儲存變更。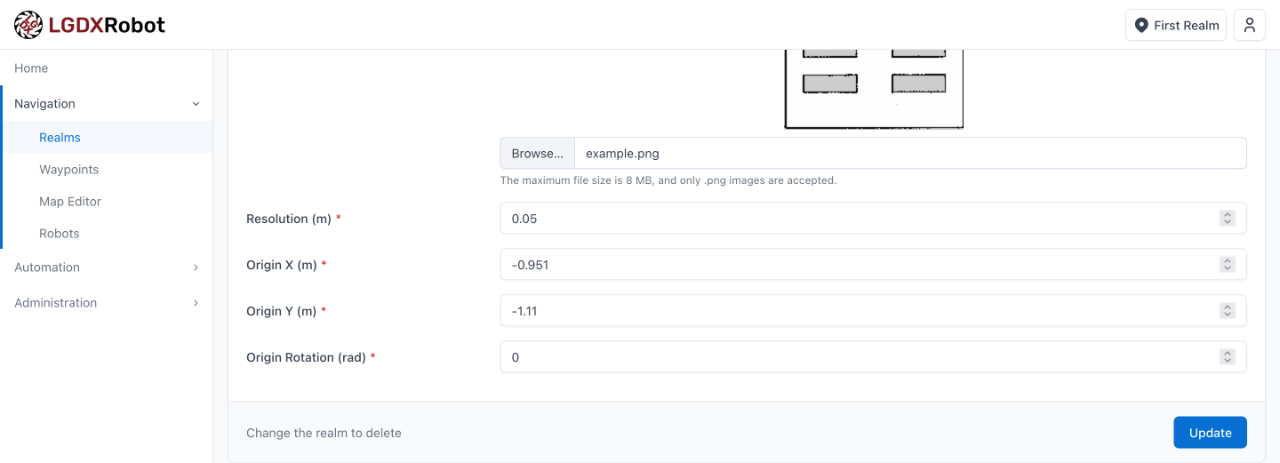
設定 LGDXRobot 2
LGDXRobot 2 一款可按需求訂製的低成本麥克納姆輪底盤機械人,支援 ROS2 及模擬功能。
- 打開另一個終端機,進入設定資料夾,然後執行以下指令:
docker run --rm -it \ --name lgdxrobot2 \ -e PUID=1000 \ -e PGID=1000 \ -v ./keys:/config/keys \ -p 3000:3000 \ -p 3001:3001 yukaitung/lgdxrobot2.desktop:latest
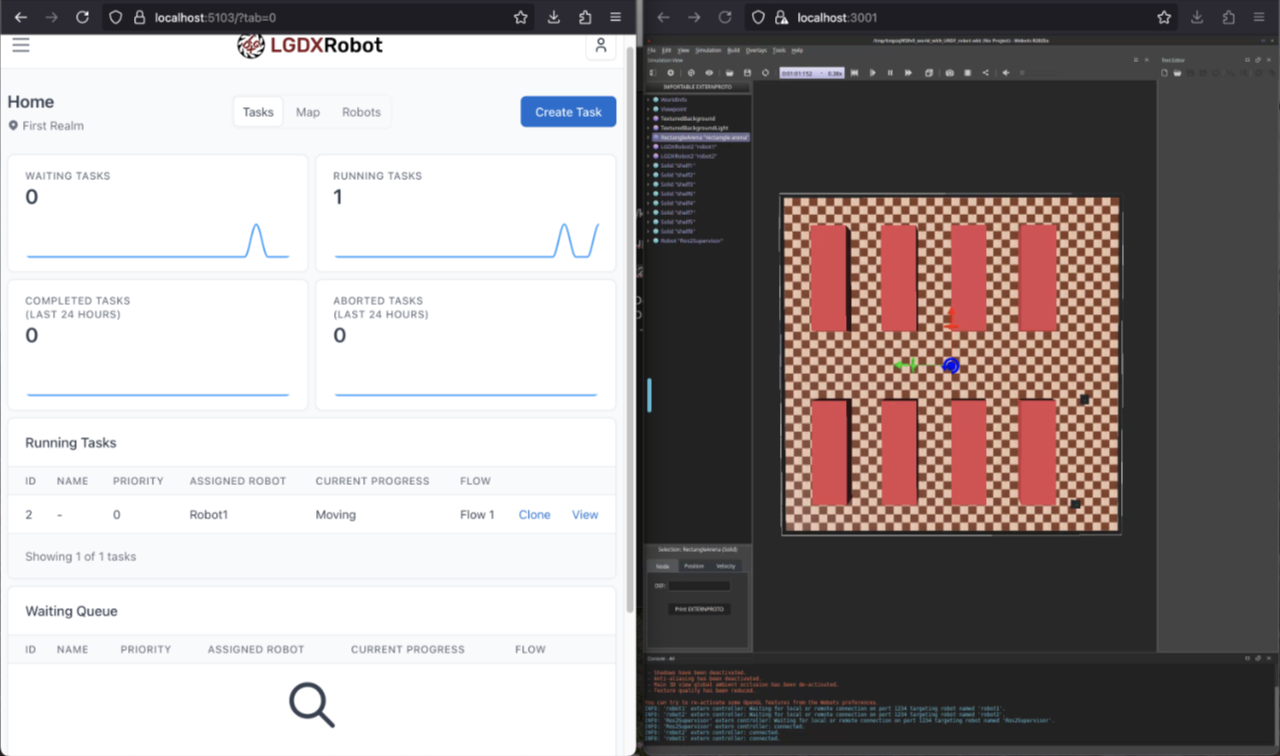
- 進入 http://localhost:3000 開啟網頁介面,介面中已打開終端機,可用來執行任何應用程式。 若終端機被關閉,可在桌面按下右鍵打開選單重新開啟。
- 執行以下指令啟動範例:
ros2 launch lgdxrobot2_bringup simulation_two_robots.launch.py
小貼士:按下左中位置的藍色按鈕可以展開設定,將指令貼下 Clipboard 裏,然後可以直接在終端機內貼上。
建立自動化任務
- 在 LGDXRobot 雲端管理系統的首頁中,按下 Create Task。
- 輸入 Flow 1 作為流程名稱,並輸入 Waypoint 2 作為第一個導航點,然後按下 Add Waypoint。
- 輸入 Waypoint 8 作為第二個導航點,然後按下 Create。
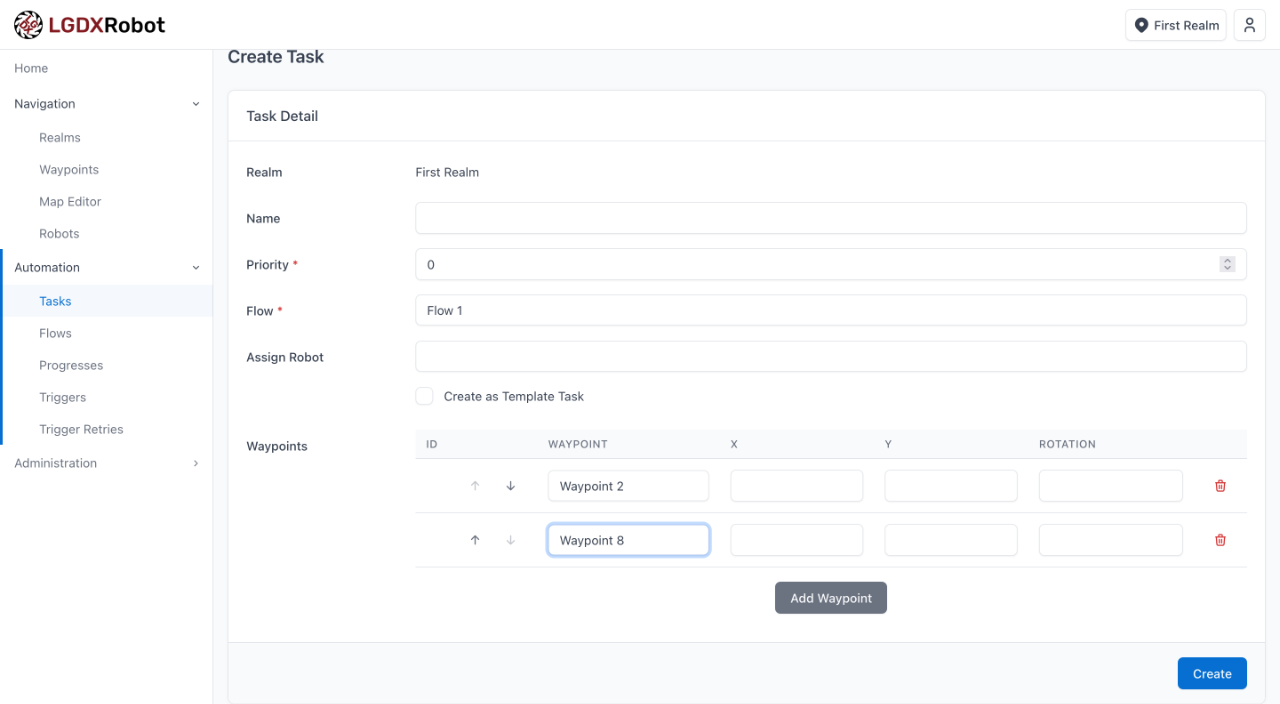
- 其中一部機械人將會開始移動。
進一步了解
- LGDXRobot 雲端管理系統,進入GitLab 或者 GitHub 取得原始碼。
- LGDXRobot2,進入 GitLab 或者 GitHub 取得原始碼。
- 閱讀說明書(只提供英文版本)