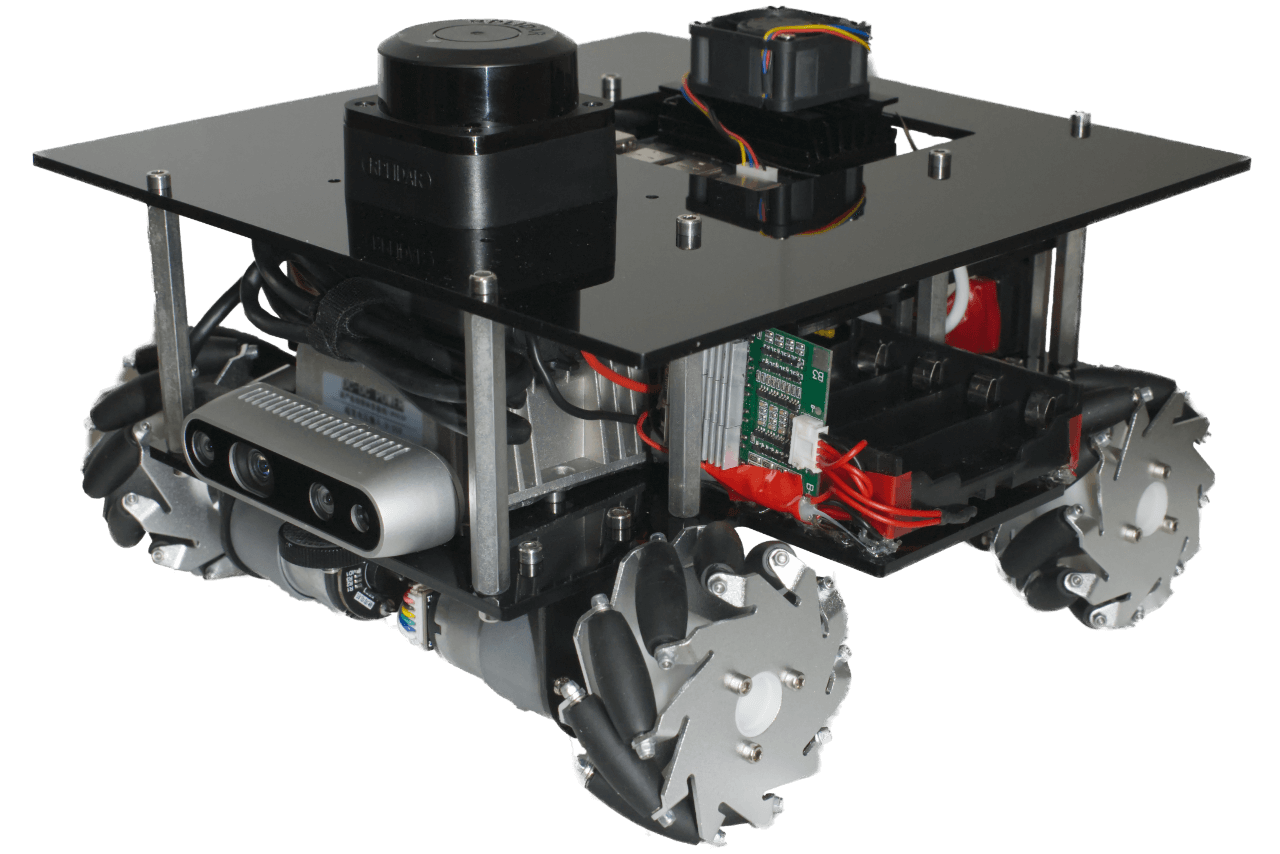
LGDXRobot2 簡介
LGDXRobot2 是一款自組 Mecanum 輪機械人,用於建立低成本、高效能的 ROS 2 機械人。
全套操作指引
說明書(僅限英文)涵蓋硬體組裝、軟件安裝及操作,指引清晰詳盡。
靈活硬件設計
韌體支援多規格底盤與 Mecanum 輪配置,電腦與感應器均可自由更換。
快捷開發方案
ChassisTuner 和 Docker 映像讓機械人開發得以簡化。
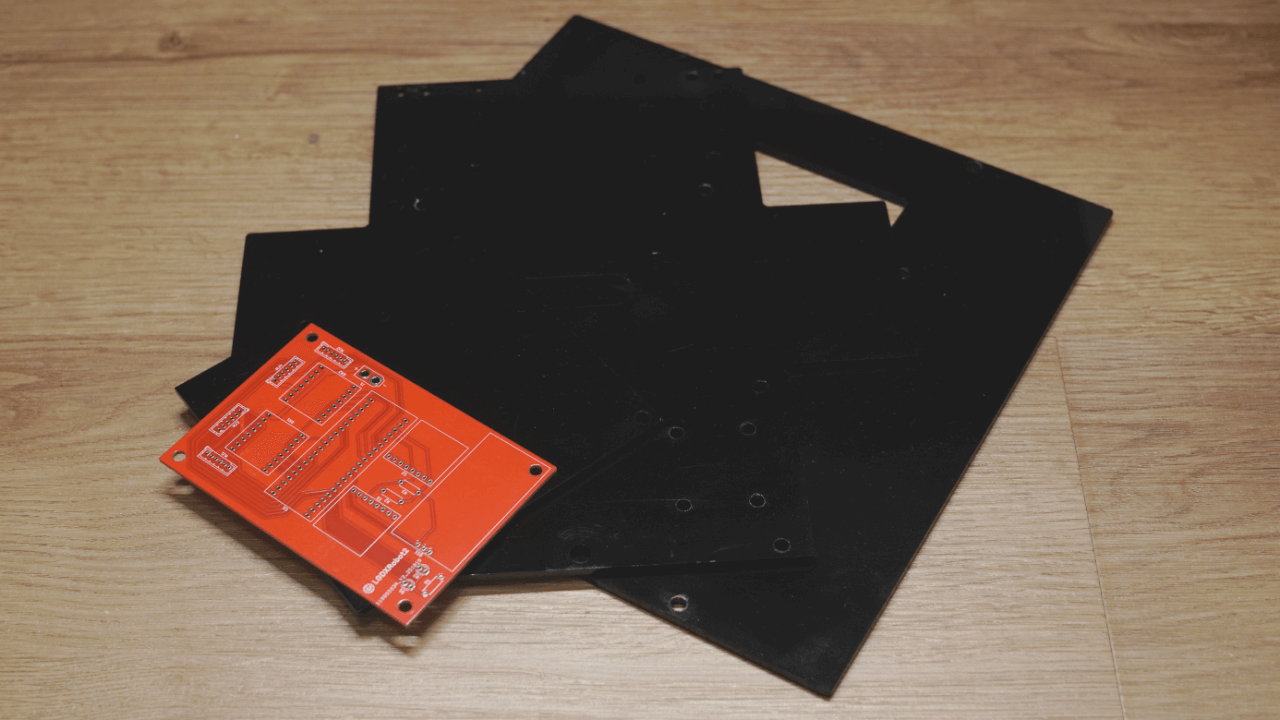
開源硬件設計
LGDXRobot2 提供全套底盤和控制板的設計,並附帶 DXF 和 Gerber 檔案,方便自行製造機械人。
底盤
三層 240×240 mm 激光切割亞加力膠板。
控制板
搭載 BlackPill MCU 與 TB6612FNG 摩打驅動器,支援四組摩打,並具備 PID 控制功能。
專用高效能測試工具
ChassisTuner 是一個圖形介面程式,用於 LGDXRobot2 的硬件測試及調校工作。
硬件測試
檢查與控制板之通訊狀態,並即時監察硬件運作情況。
PID 微調
獨立設定每組摩打之 PID 參數,並以互動圖表即時顯示調整效果。
靈活擴充機械人系統
LGDXRobot2 可與 LGDXRobot 雲端管理系統無縫整合,為可擴充的機械人解決方案建立穩固基礎。
遙距監察
經由實時網頁介面,隨時掌握 LGDXRobot2 的運作狀態。
自動化任務管理
委派 LGDXRobot2 執行各式自動化工作,例如物件運送。
盡展 ROS 2 無限可能
LGDXRobot2 全面支援 ROS 2 中的核心工具,助您建立更智能的機械人應用。
RViz
實時呈現 LGDXRobot2 的三維模型、摩打狀態及感應器讀數。
Nav2
執行實時定位與地圖構建 (SLAM),並實現自動導航功能。
Webots
毋須實體 LGDXRobot2,於模擬環境中運行 ROS 2 及 LGDXRobot 雲端管理系統。
快速配置 ROS 2 系統
只需一個指令,便能快速配置 ROS 2 於任何電腦。其內建的網頁介面,使各種 ROS 2 工具的存取變得極為便利。
docker run -d \ --name lgdxrobot2 \ -e PUID=1000 \ -e PGID=1000 \ -p 3000:3000 \ -p 3001:3001 \ yukaitung/lgdxrobot2-desktop:latest
問與答
LGDXRobot2 是否提供預裝版本供選購?
LGDXRobot2 暫無成品出售,故須自行組裝。