LGDXRobot2
Highly configurable low-cost DIY Mecanum wheel chassis for hobbyists.
What is LGDXRobot2?
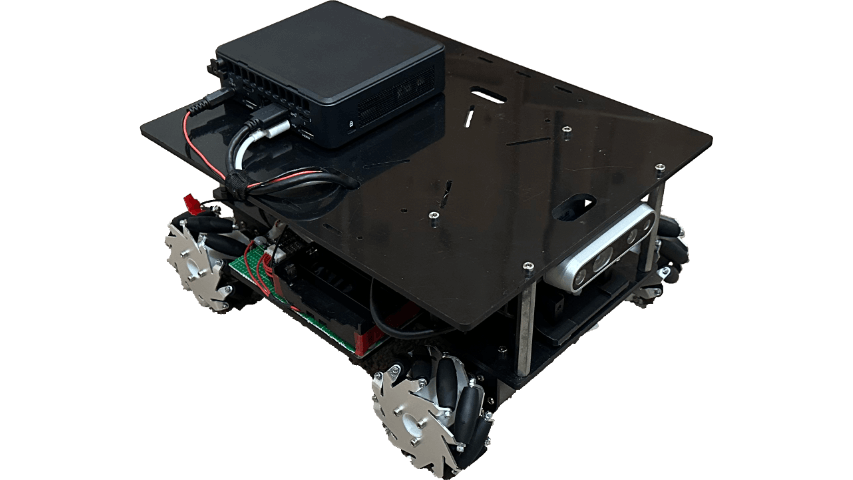
Build Your Robot with Any Configuration
Build your LGDXRobot using any chassis size and Mecanum wheels. Choose any computer and sensors to run your robotics software.
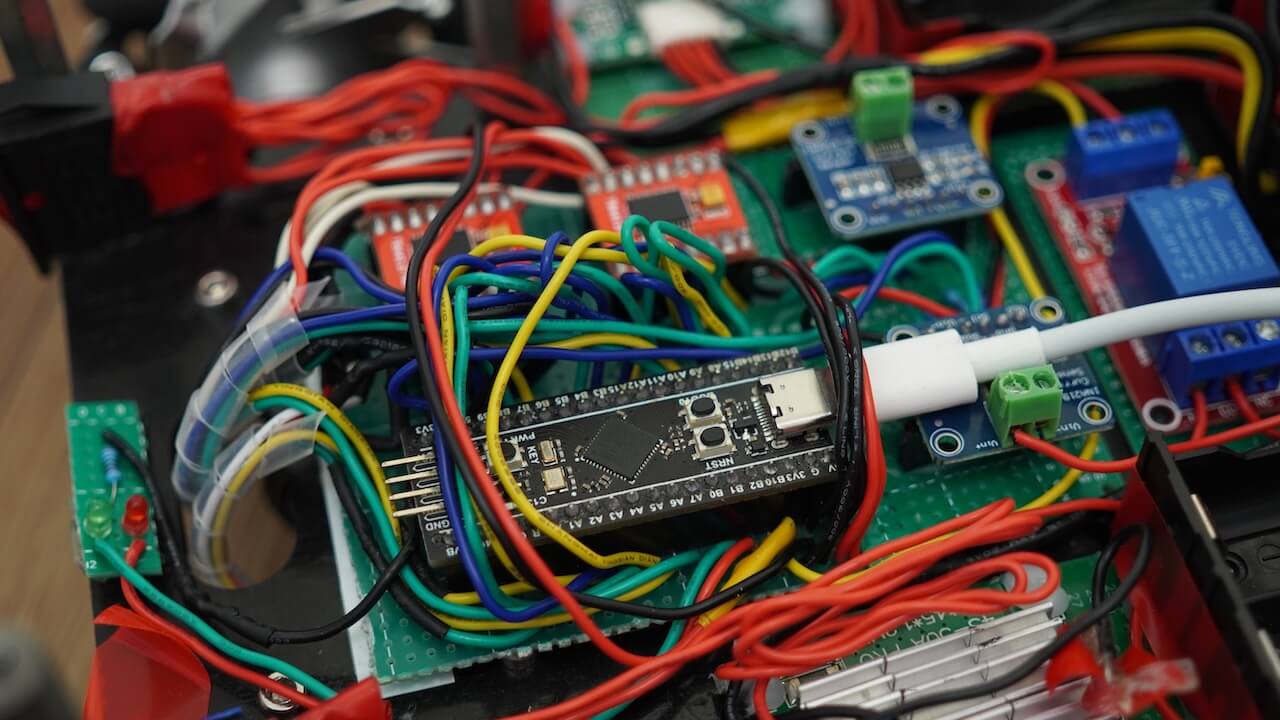
Easy-to-Build Motor Controller
LGDXRobot2 features an open-source controller board that drives four motors using a BlackPill MCU and a TB6612FNG motor driver. The modular design is easy to replicate and adapt.
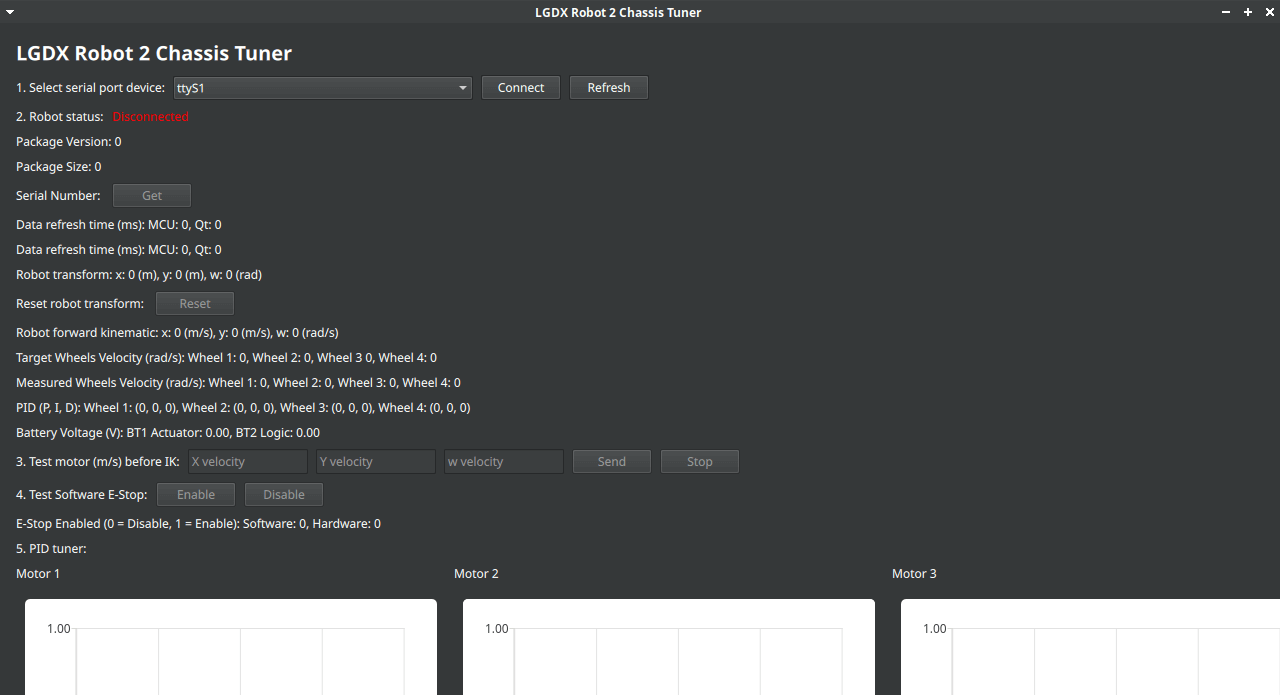
Testing LGDXRobot2 with ChassisTuner
Hardware Testing
Test communication with the controller and monitor the robot's status.
PID Fine Tune
Fine-tune the PID settings for each motor using charts to achieve maximum performance.
Unlimited Possibilities with ROS2
LGDXRobot Cloud
Manage and monitor your LGDXRobot2 remotely via the cloud.
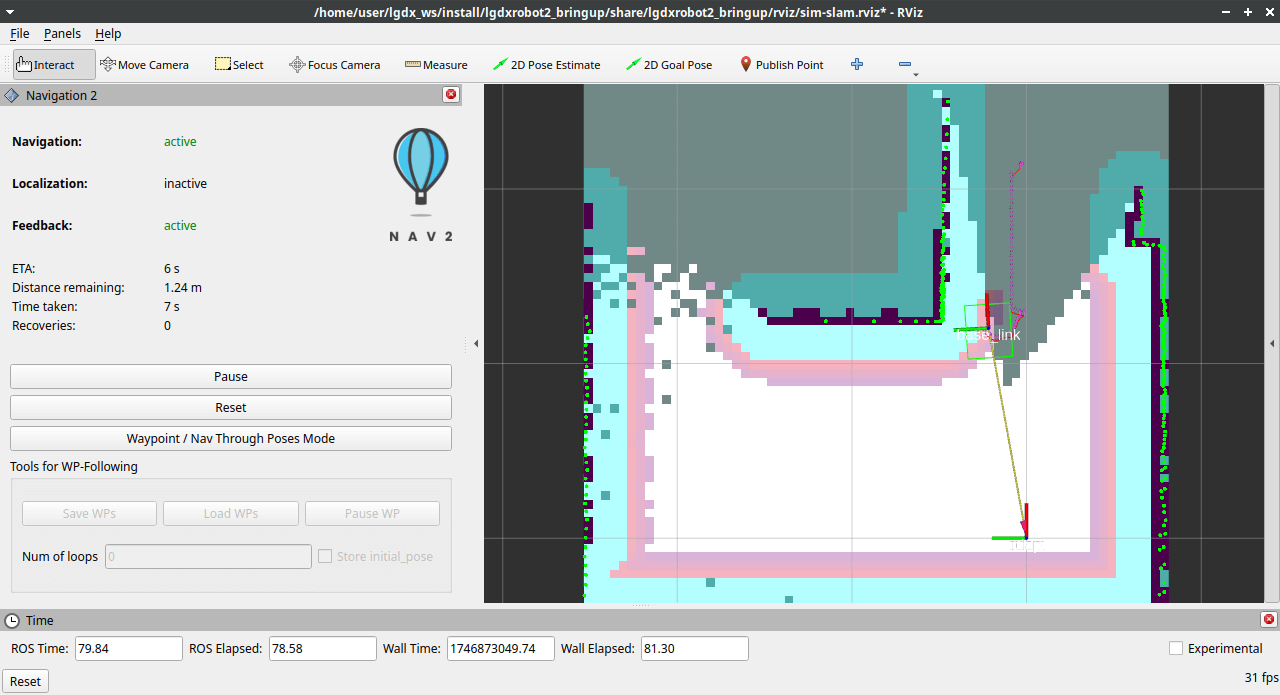
Nav2
An open-source navigation framework.
Webots
Simulate the robot without the need for physical hardware.
Download
ROS2 Package
ROS2 integration for the hardware, with examples for both physical and simulated robots.
Download